tdang1
04/02/2023 at 09:30:31 AM PDT
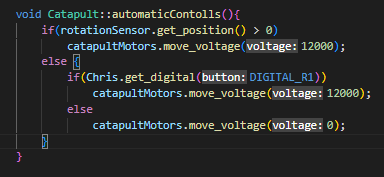
I am attempting to utilize the rotation sensor to pull down the catapult to its primed position automatically. The code works as intended when I start the program with the catapult, not in its primed position. However, if I start the code with the catapult in its primed position, it does not stop. I have both attached a video of the phenomenon happening and attached pictures of my code to this post.
Link