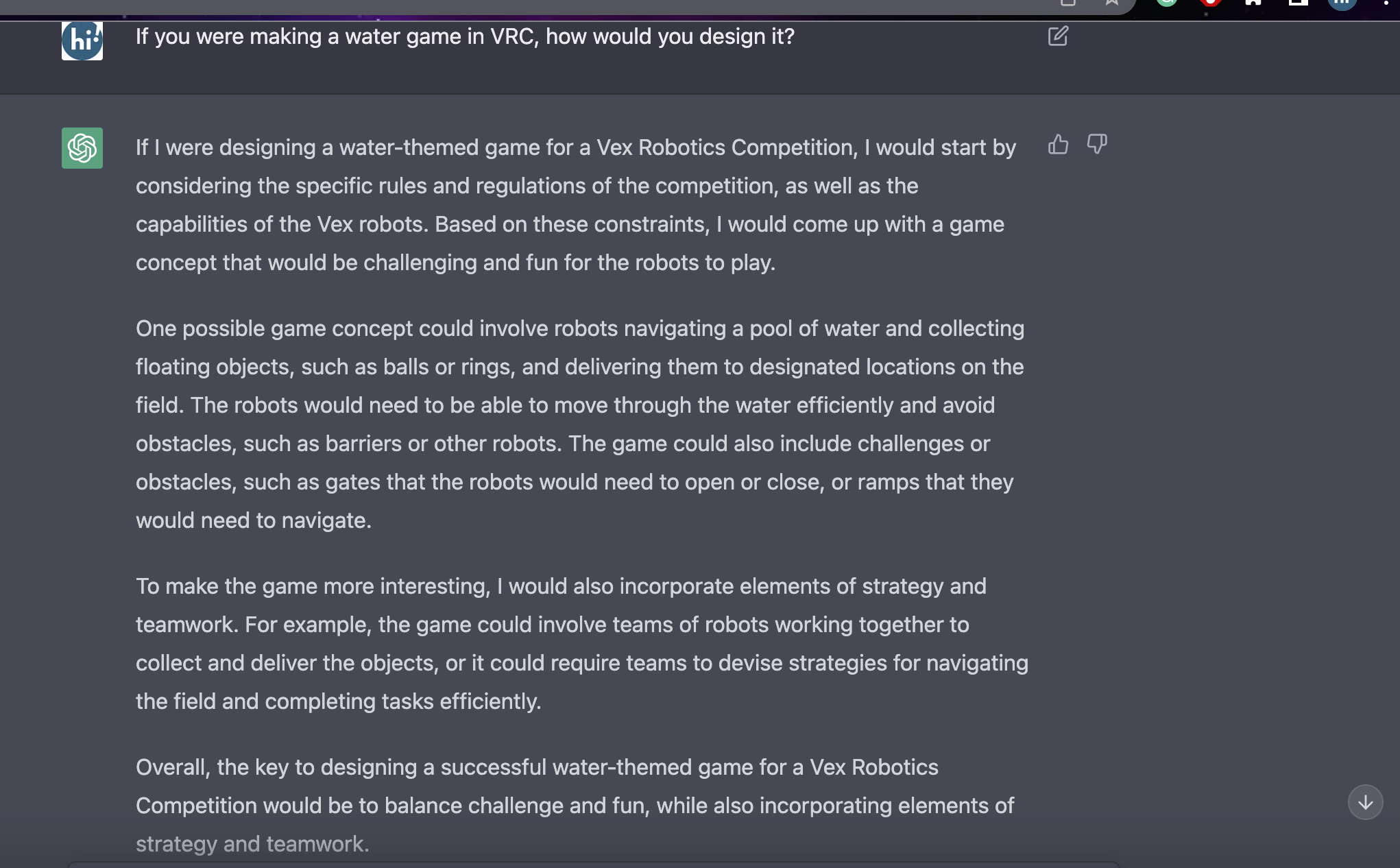
Oh, i forgot about PIC
Question
What is the best way to shoot discs into the high goal in vex robotics spin up
Response
There are a few key things you can do to improve your accuracy when shooting discs into the high goal in VEX Robotics Spin Up.
Make sure your robot is properly aligned with the goal. This will help ensure that your shots are going where you want them to go.
Use a consistent shooting technique. This will help improve your accuracy and make it easier to repeat successful shots.
Use a high-powered shooter to shoot the discs. This will give your shots more speed and accuracy.
Practice, practice, practice! The more you practice shooting discs, the better you will become at it.
Work on your robot’s aim. You can do this by using sensors and feedback systems to help your robot aim more accurately.
Overall, the best way to shoot discs into the high goal in VEX Robotics Spin Up is to practice, use a consistent shooting technique, and make sure your robot is properly aligned and has a high-powered shooter.
Another question
Are flywheels or catapults better at shooting discs in the high goal for vex robotics spin up?
Response
It is difficult to say definitively which is better for shooting discs into the high goal in VEX Robotics Spin Up, flywheels or catapults. Both of these mechanisms can be effective for shooting discs, but the best choice for your team will depend on a variety of factors, including the specific rules and game elements of the competition, the skills and abilities of your team, and the strategies and tactics that other teams are using.
Flywheels are typically faster and more powerful than catapults, which can make them effective for shooting discs long distances. However, they can be more difficult to control and aim accurately.
Catapults, on the other hand, are typically slower and less powerful than flywheels, but they can be easier to aim and control. This can make them effective for shooting discs at short to medium distances.
Ultimately, the best approach for shooting discs in the high goal in VEX Robotics Spin Up will depend on your team’s specific strengths and the strategies and tactics that you develop. It may be worth experimenting with both flywheels and catapults to see which works better for your team in different situations
5 Likes

I think the attempts to get rid of the unpopular colors of IQ parts are one of the only sales that vex has ever done. That probably sealed the casket on ever getting colored metal for the v5 system.
1 Like
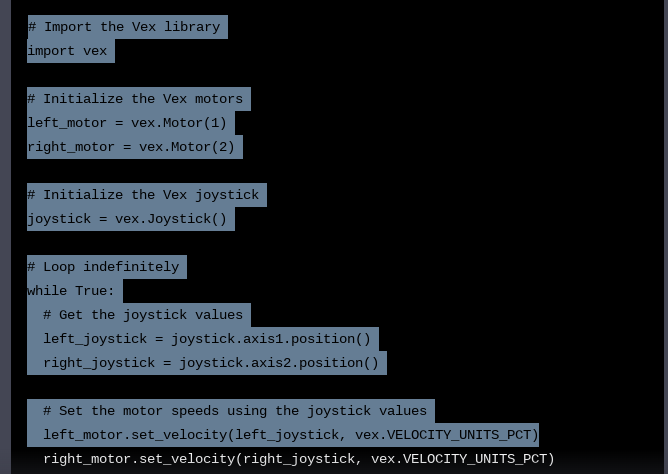
I played around with this, and it’s really interesting. I told it to write a program to control a vex robot in PROS. At first, it was incorrect. For example, it did #include “robot.h”, not main.h. It also mixed up okapi and pros as well as the names of functions. However, I told it what is was doing wrong and it fixed it. For example, I told the AI that it should be including main.h, and it told me that was correct, and rewrote the program. Eventually, I asked it to write a PID loop in a PROS task to control a flywheel without using okapi and it outputted this:
#include "main.h"
// Motor and controller declarations
auto flywheelMotor = Motor(1);
auto controller = Controller();
// PID constants
const double kP = 0.5;
const double kI = 0.1;
const double kD = 0.2;
// Setpoint for the flywheel
const int setpoint = 200;
// PID controller variables
double previousError = 0;
double integral = 0;
void initialize() {
// Initialize the flywheel motor and other devices here
}
void autonomous() {
// This is where you can put code that controls the flywheel during the
// autonomous phase of the competition
}
void flywheelTask(void*) {
// This is the code that runs in the flywheel task
while (true) {
// Read the current velocity of the flywheel
int velocity = flywheelMotor.getActualVelocity();
// Calculate the error
double error = setpoint - velocity;
// Update the integral and the derivative terms
integral += error;
double derivative = error - previousError;
previousError = error;
// Calculate the control output
double output = kP * error + kI * integral + kD * derivative;
// Set the motor power based on the control output
flywheelMotor.moveVoltage(output);
}
}
void opcontrol() {
// This is where you can put code that controls the robot during the
// operator-controlled phase of the competition
// Start the flywheel task
taskCreate(flywheelTask, TASK_DEFAULT_STACK_SIZE, NULL, TASK_PRIORITY_DEFAULT);
}
A little rough around the edges, but pretty good.
9 Likes
Asked a bot to come up with next years game:
"Vex Robotics Wrap Up 2023-2024:
Wrap Up is a game for the Vex Robotics Competition in which robots must take a big rolling wedge (15) to make a double goal zone while following the three purple balls and a blue mini ball. Matches begin with a 15 second autonomous period and 1:45 minute rounds.
Teams are free to come up with their own names and logos, and they are encouraged to adopt the themes of their favorite movies, TV shows, bands, video games, whatever inspires them.
While the judging criteria will remain the same, some teams will also have a few added options based on the potential support for their project. Some teams have proven themselves on previous competitions and may win additional awards such as the United States Championship or the Strongest Team Award. Please check our website at www.vexrobotics.com/tournaments for the full list of awards available."
I should ask Dall-E to design the field!
7 Likes
It’s not great, but it’s kind of impressive it does give the impression of a VEX field set up in a classroom.
4 Likes
That gives an interesting golf idea, kinda like slapshot. Imagine you need you need to launch balls with precision from behind a line into different holes?
1 Like
7 Likes
This is an older thread, but I just asked ChatGPT to write some poetry about robotics:
"Bots that glitch, gears that grind
Frustration mounts, peace of mind declines
Coding errors, circuits fried
VEX robotics, it’s not a breeze to decide
Sensors that fail, motors that stall
The competition looms, pressure installs
Hours spent, progress slow
Will we make it, it’s hard to know
But we persevere, we won’t back down
We’ll fix the bugs, wear the frown
For the love of the game, we strive
VEX robotics, it’s worth the strive
Through the failures and the falls
We’ll stand tall, and give it our all
For the thrill of the build, the joy of the code
VEX robotics, it’s worth the load
It’s a challenge, but one we’ll face
We’ll make a robot that will leave a trace
With pride and determination, we’ll see it through
VEX robotics, it’s what we’ll do."
14 Likes
Doofenshmirtz Just Learned He’s A Cartoon Character:

Am I the only one who started jumping up and down with excitement after reading that video title, thinking they finally brought to life with OpenAI one of my favorite Ph&F characters? ![]()
Still a nice short.

5 Likes
Grammarly added a chatgpt chatbot that can help you write (or write for you), so I asked it to write an engineering notebook page for over under. this is what it wrote.
Engineering Notebook Page: Design of Robot for Vex Game “Over Under”
Introduction:
The Vex Game “Over Under” is a challenging game that requires a well-designed robot to perform effectively. The game primarily uses 6.8" Reuleaux Tetrahedrons as the game object. The objective is to score the Reuleaux Tetrahedrons in a goal on the side of the field. At the end of the game, the robot has to climb a pole with a 4" diameter. In this engineering notebook page, we will discuss the design of a robot suitable for this game.
Design:
The robot for the “Over Under” game needs to have the ability to pick up the Reuleaux Tetrahedrons from the ground and score them in the goal. Therefore, we designed a claw mechanism that can pick up the Reuleaux Tetrahedrons and rotate to place them in the goal. The claw mechanism consists of two arms that are driven by servos. The arms can move inwards and outwards to grip the Reuleaux Tetrahedrons.
To ensure that the Reuleaux Tetrahedrons do not fall out of the claw mechanism during transport, we added a rubber grip to the arms. The rubber grip provides a strong grip on the Reuleaux Tetrahedrons, ensuring that they remain in the claw mechanism even when the robot moves.
We also designed the robot to have a mobile base that can move in all directions. The mobile base consists of four wheels that are powered by motors. We added omni wheels to the front and back of the robot to improve its maneuverability. This design allows the robot to move quickly and easily across the field.
To climb the pole with a 4" diameter, we added a lift mechanism to the robot. The lift mechanism is powered by a motor and consists of a telescopic arm that can extend and retract. The arm is attached to a hook that can latch onto the pole. The motor can be used to lift the robot up the pole.
Conclusion:
The design of the robot for the Vex Game “Over Under” requires careful consideration of the different elements of the game. The robot needs to be able to pick up the Reuleaux Tetrahedrons and score them in the goal, move quickly and easily across the field, and climb the pole with a 4" diameter at the end of the game. Our design addresses all these requirements, making it a suitable robot for the “Over Under” game.
sorry for reviving a dead topic
6 Likes