Rhett
01/05/2023 at 08:23:23 AM PST
Basically, when I try and set the motor brake type to hold it is acting as if the motor is on coast and not hold and is allowing my catapult to slowly un-prime itself, anyone have any idea why it’s doing this?
This is my code
void load()
{
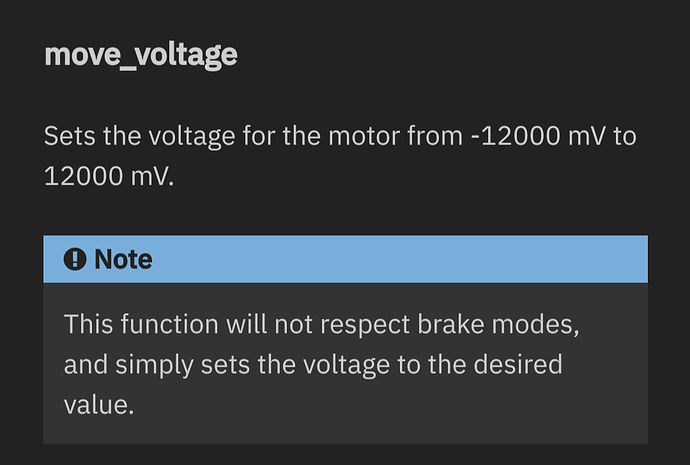
cataMotor.setBrakeMode(AbstractMotor::brakeMode::hold);
while(limitSwitch.get_value() == false)
{
piston.set_value(0);
cataMotor.moveVoltage(-12000);
}
cataMotor.moveVoltage(0);
}