JcbMrgn
12/09/2022 at 07:51:19 AM PST
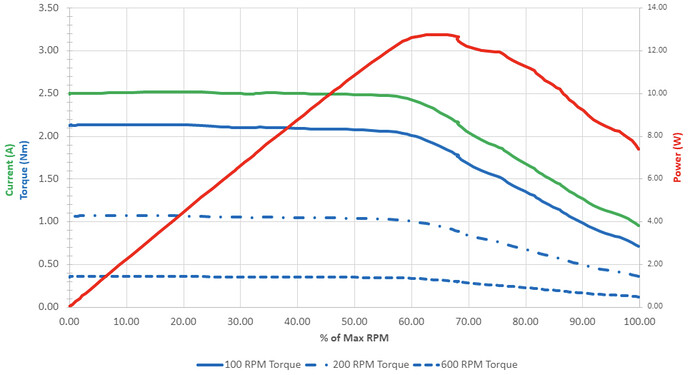
On VEXs website under “Understanding V5 Smart Motor (11W) Performance” it has this graph.
This shows that the V5 motors will output the most torque and power around 50-60% rpm.
My question is if I wanted the max acceleration for my robot I would need as much torque as possible. This should mean that I should start my motors at 60% and then ramp up to 100%. Is this correct and if so how fast should I ramp up?
SeenSeal
12/09/2022 at 08:14:02 AM PST
It really depends on what you are trying to accomplish. If you want a smooth transistion from 0 to full speed then you would want to slowly ram up the velocity, but its werid because of the motor has frimwear that limits the max curret to 2.5A so a normal model doesn’t really work. If you just want to get up to max speed as fast as possible then just give the motor 12 volts and the motor will spin up.
JcbMrgn
12/09/2022 at 11:46:57 AM PST
Replying to SeenSeal ↩️
My question is if more torque means that more force can be put into moving the robot (F/m = a) then it makes sense to set your motors to 60% then after they reach that speed set them to 100? For example:
motor.spin(fwd, 60, percent);
waitUntil(motor.velocit(percent) = 60);
motor.spin(fwd, 100, percent);
This works in theory because the if the motor isn’t above 60% then it still needs to accelerate and you would want max torque. Once the motor has reached 60% then you set it to 100 to reach its max speed.