This is an archive of G2M. Please refer to this post for more information. Archived on 2026-01-12.
Drive Screw Jointing
Bb34567
12/11/2022 at 02:35:33 PM PST
Im interested in screw jointing my drive, either switching for this season or for next season and wanted a broader look on it.
What are the pros and cons affiliated with it? How do i do it , its not a typical screw joint cause the metal isnt moving, right? how many people that have done it reccomend? Thanks and im impressed by this new forum
Amanda
12/11/2022 at 03:00:54 PM PST
Lower friction is the main reason most people use screw joints on their drive. Because a screw is a cylinder, wheels and gears can freespin on it very smoothly. Along with this screw joints can also be used to add rigidity to your drive base, connecting one side c channel to the other and making the entire structure flex less.
For cons, it can be a bit difficult to build if you are new to the idea of screw joints I guess, at least compared to just using axles, but realistically there arent any cons that I can think of rn.
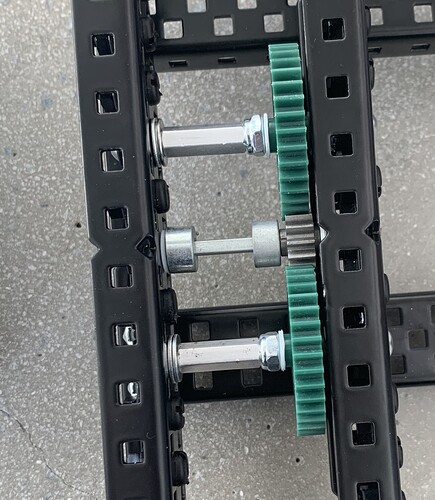
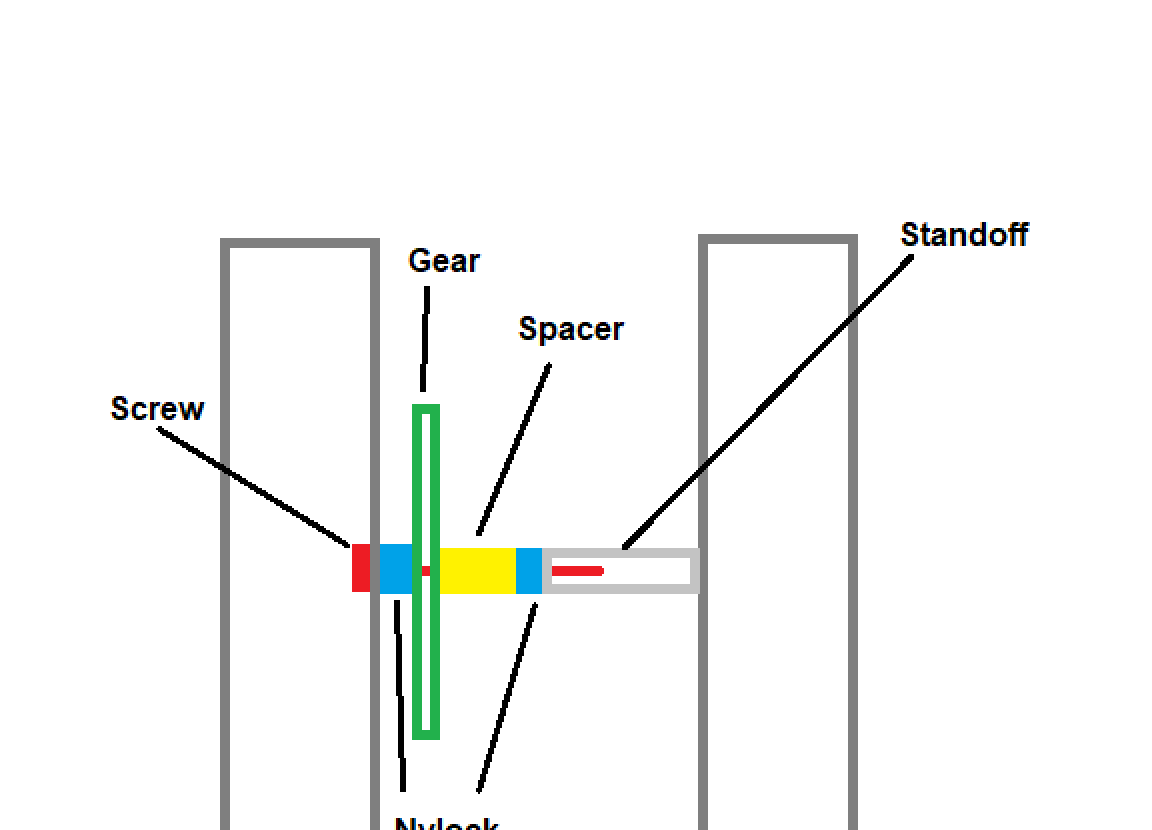
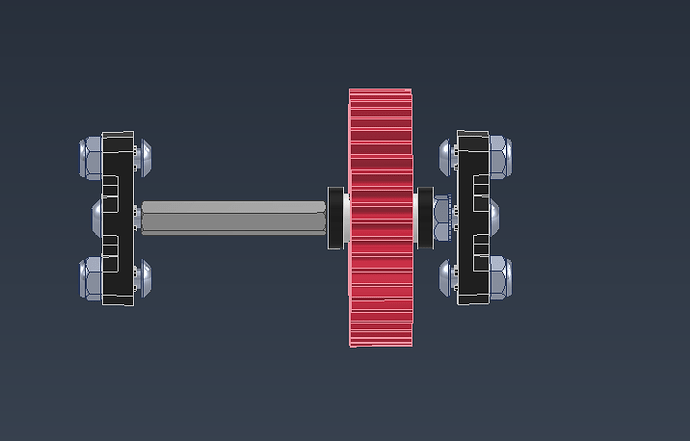
There’s actually multiple ways to do it, for gears a popular way is to have a standoff on one side (see picture), but you can also just have a screw going all the way through from one c channel to the other and add spacers to keep things from moving, the same way as you would use a shaft
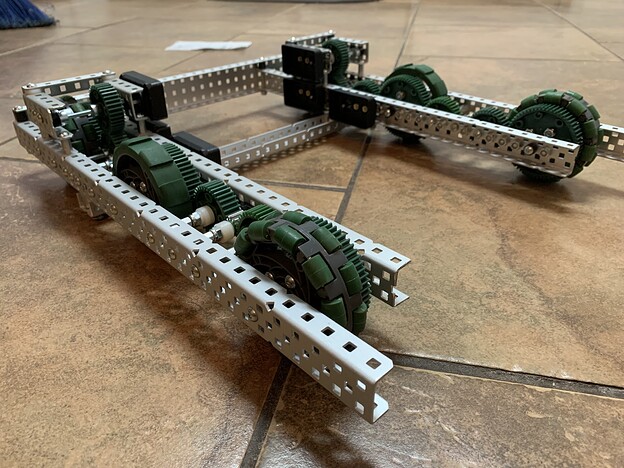
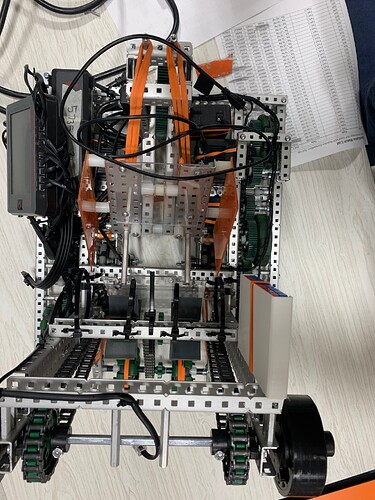
Hi, this is my first year and I attempted to do screw joints on my robot. Everything was fine until the competition, the drive train was pulling 6 watts and the screws would loosen and rub on the gears. Eventually, the motors overheated.
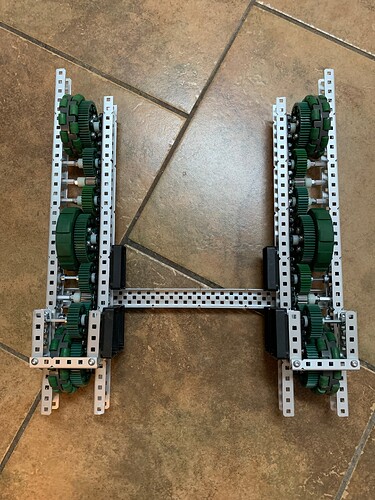
Just by quickly looking at it, you should add another crossbar for support, if you only have one the c channels can flex away from each other and cause friction. Because its only a picture of the drive base I hope that was included in the rest of the robot, but if not that’s something to add.
Besides that from this angle the screw joints themselves look fine, a top-down picture would be helpful to really see if there’s a problem, but it all looks ok.
Adding onto everything else, some other small improvements that can be made, 12tooth gears normally arent the best for drive bases (friction issues, but also I used it on my worlds robot and it had amazing friction, just takes time to get right), and having all of your motors in the back means there are 5 gears that need to transfer power to the front wheel, I would recommend moving a motor closer to the front just so everything spins nicer with motors connected
pretty much the same as the do nots of a normal shaft based drive base. Don’t cantilever things, test your friction before finishing the drive base, make sure screws are tight and will hold in place (drive base vibrations can mess with this, use nylocks and you shouldn’t have a problem).
Then theres more general things like what I said in my other post:
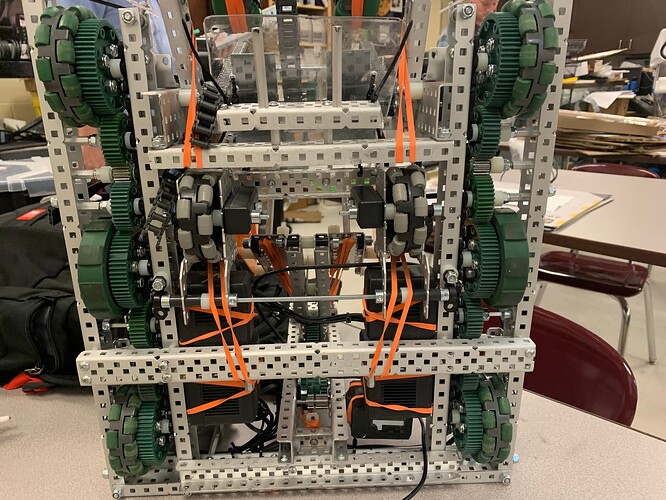
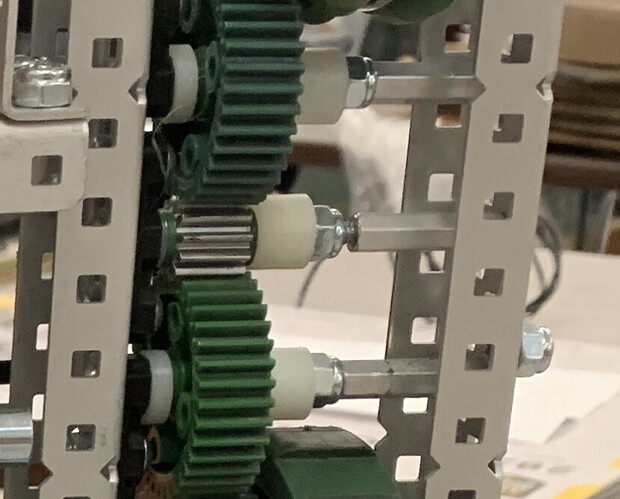
I was looking at the drive base and thought “The only potential problem I could see is the screw moving out from the standoff and forcing everything to rub into the bearing, but I doubt that would actually happen”… and then I opened the “issue” image lol.
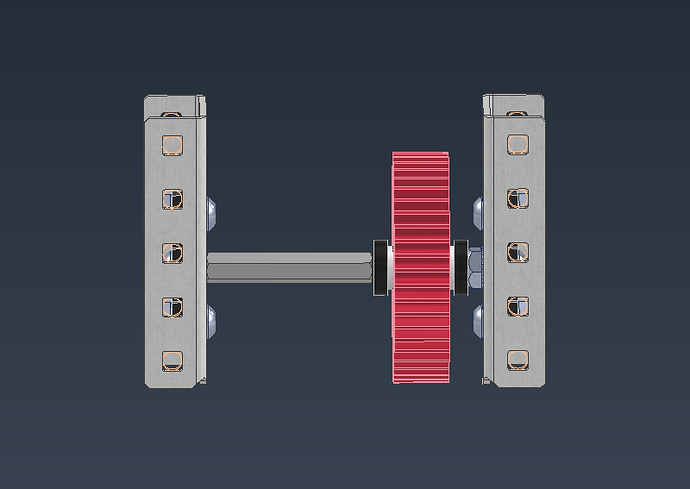
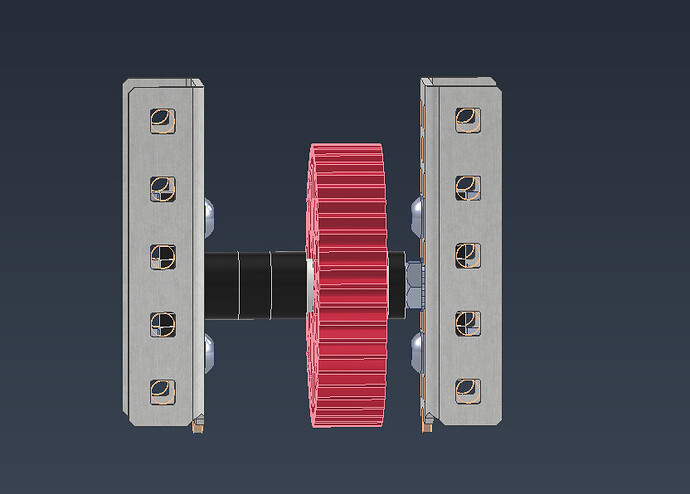
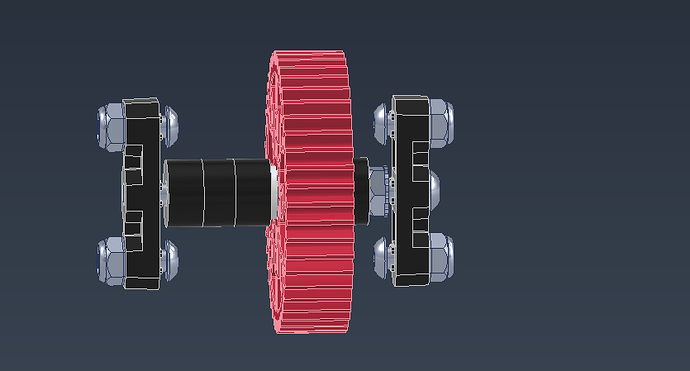
So yeah im 90% sure vibrations are the cause of this, which basically means the screw is slowly being rotated by either your catapult shooting or just general vibrations that are normal on a robot, you can fix this by having a nylock sandwiching the inner c channel to hold the screw in place so it doesnt move (I removed the bearing for this image because you shouldnt need it, screws should stay aligned in the center without one)
This is the issue.
If your screw is not long enough to run through both channels, it should go:
screwhead-bearing*-c-channel-keps nut-spacer/washer-spinning thing-spacer/washer-nylock (optional)-standoff-c-channel-screwhead.
The shoulder screws you would use for a drive screw joint can be found here:
Basically, shoulder screws have a slightly thicker, unthreaded portion at the top of the screw which fits perfectly into a c-channel hole and perfectly centers the screw. Highly recommend, robosource has a great price for them.
I suggest getting the color-coded large pack, and another pack or 2 of the red .5" 1-metal shoulder, I find that I use them a lot.
David_Martin
08/31/2023 at 10:06:01 PM PDT
what about with a wheel ?? please help the 3 hole wide