Leo
12/02/2022 at 07:27:59 PM PST
you heard it here first on g2m only - if you balance your robot, you can run canti wheels like pilons!
- straight from mikey pilons’ mouth himself.
you heard it here first on g2m only - if you balance your robot, you can run canti wheels like pilons!
- straight from mikey pilons’ mouth himself.
a balanced drive is the only reason canti x is the meta
It isn’t a specific type of wheel, but rather a wheel that has been mounted with only one point of support.
In an ideal canti drive setup, you do actually have points of support holding the axle, the difference is that both of those points are on the same side as the wheel. The downside is that this will lead to there being more stress on the axle, and more force on the supports.
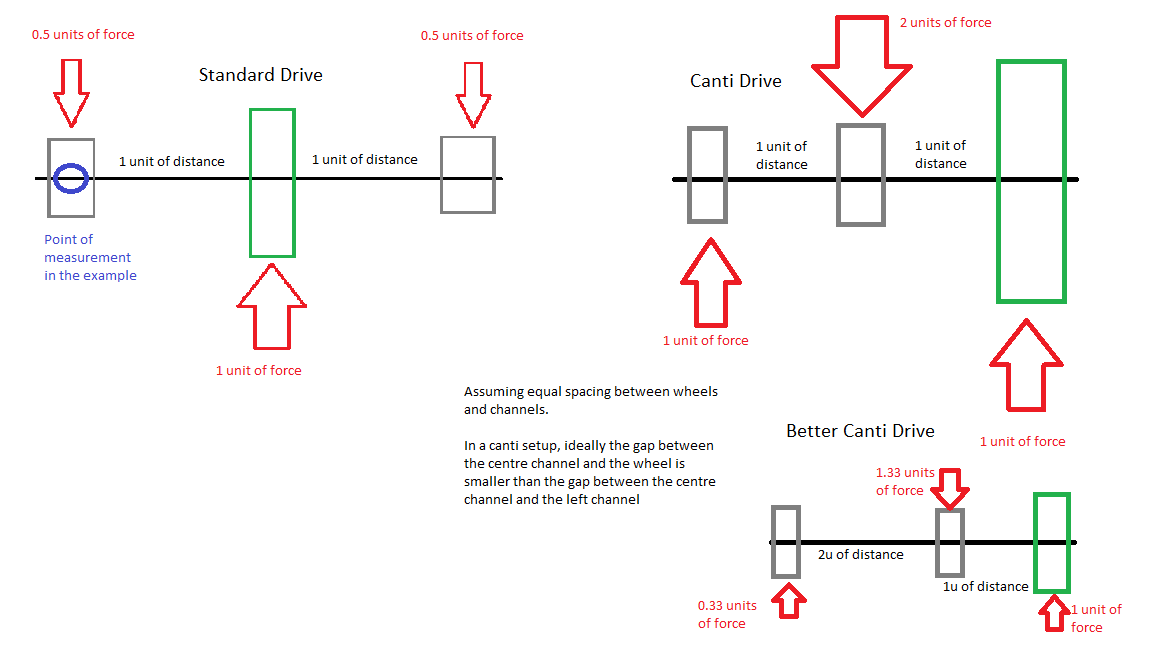
For a robot to be stable, it needs to be at static equilibrium, where the sum of the forces equals zero. For example, in the standard drive configuration shown, there is 1 unit of force upwards (positive), and 2 arrows that are 0.5 units of force each pointing downwards (negative), so the total amount of force is zero (1 - 0.5*2 = 0). If this didn’t add up to zero, then it means that the robot is going to start moving vertically.
Additionally, the sum of rotational force around any point needs to be zero. The rotational force (also called the ‘moment’ or ‘torque’ depending on the situation) is equal to the amount of force multiplied by how far away the force is. (Note: this is assuming that the direction of the force is perpendicular to the distance being measured). If this does not add up to zero, it means that the robot is going to fall over.
For example, if we measured the rotational force around the left c-channel in the standard drive configuration, there are 3 rotational forces we need to add together.
The first force we’ll calculate is that exerted by the force on the wheel. It’s 1 unit of distance away from the point we’re measuring, and has 1 unit of force pushing it, so the torque is 1 (1*1=1). We can also see that this force is going in a counter clockwise direction, so we will say that the rotational force is 1 unit [CCW].
The second force is the one being exerted by the right c-channel. This force is only 0.5 units strong, but is 2 units away, so the rotational force is 1 unit (2*0.5=1), and we can tell that is pushing in a clock-wise direction.
The third force is the force pushing directly on the left c-channel. The force is 0.5 units, and the distance is 0, so the rotational force that it causes around the left c-channel is also zero (0.5*0=0).
If we add these all up, the sum of the rotational forces around the left c-channel equals:
Sum = 1 unit [CCW] + 1 unit [CW] + 0
If we say that counter-clockwise is positive and clockwise is negative, we get:
Sum = 1 unit - 1 unit + 0 units
which equals zero. Therefore this robot is stable.
I love the post but, let’s just remember to stay on topic. You can always create a new post about cantilever drives.
Moved to a new topic